{kind=link}
Lidar es el acrónimo de las palabras en inglés Light Detection And Ranging, la cual es una técnica de percepción remota activa (necesita una fuente artificial), y trabaja bajo el mismo principio de funcionamiento que un radar. Este consiste en enviar pulsos de luz láser, en lugar de pulsos de ondas de radio, para medir objetos (medio dispersor) del tamaño del orden de la longitud de onda de la luz (unos cuantos cientos de nanómetros). Estos pulsos de luz al llegar al medio dispersor se esparcen en diferentes direcciones, y generalmente es el que viene de regreso el que nos interesa medir; debido a que junto a la fuente de luz láser generalmente se encuentra un detector óptico (configuración monoestática). Este pulso de luz retroesparcido es detectado y grabado para después ser analizado y extraer información de alguna propiedad o propiedades del medio por el cual viajó el pulso.
En óptica en la teoría de esparcimiento puede haber dos casos. El primero implica que la luz incidente (al dispersor) y la esparcida tengan la misma longitud de onda (mismo color) y en el segundo la luz esparcida tiene una longitud de onda (color) diferente a la longitud de onda de la luz incidente. Al primer caso se le conoce como esparcimiento elástico, mientras que al segundo se le conoce como inelástico. También existe el régimen del esparcimiento molecular o de Rayleigh (por Lord Rayleigh) y el de Mie (por Gustav Mie) o de aerosoles, en el primer régimen el dispersor es más pequeño que la longitud de onda de la luz incidente y en el segundo, el dispersor es igual o más grande que la longitud de onda de la luz incidente.
El mayor uso científico de Lidar está en la medición de las propiedades de la atmósfera de la tierra, mientras que el mayor uso comercial de Lidar está en topografía y la medición de profundidades en agua (batimetría). Esta técnica ha contribuido enormemente en el conocimiento de la atmósfera en particular en la medición de componentes atmosféricos, como la concentración de gases de efecto invernadero (dióxido de carbono, metano, óxido nitroso y clorofluorocarbonos) y la determinación de variables de estado atmosféricas básicas; es decir, temperatura, presión, humedad y viento, así como aerosoles y nubes. La técnica Lidar también ha sido utilizada para investigar procesos turbulentos y ciclos diurnos de la capa límite planetaria, incluyendo los flujos de vapor de agua y ozono. El agotamiento de la capa de ozono estratosférico se ha documentado globalmente con esta técnica; así como el papel fundamental y la clasificación de las nubes polares estratosféricas, de acuerdo a sus propiedades de esparcimiento. Fenómenos meteorológicos tales como huracanes, ondas de sotavento en montañas y pasajes frontales se han estudiado con esta técnica, así también sirve para distinguir entre gotas de agua y cristales de hielo en las nubes [1].
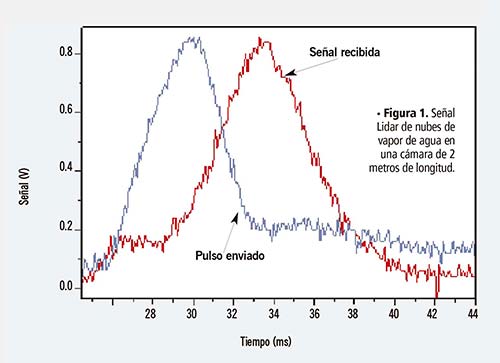
una cámara de 2 metros de lon
Lidar contribuye al conocimiento de los efectos climáticos de los aerosoles. Con Lidar también se han estudiado las perturbaciones estratosféricas después de erupciones volcánicas mayores y se ha detectado el transporte intercontinental de: aire contaminado, polvo de desiertos, humo de incendios forestales. En la mesósfera Lidar ha probado la existencia de capas de iones y átomos metálicos. Los instrumentos Lidar pueden operar desde el suelo o desde aviones y sistemas Lidar han sido puestos en el transbordador espacial o en satélites.
Lidar con formación de imágenes está siendo ocupado en representaciones electrónicas de objetos en 3D, tales como edificios para aplicaciones de realidad virtual [2].
Los antecedentes de Lidar datan desde 1930 cuando Synge sugirió un esquema en el cual un reflector antiaéreo podría ser utilizado como una fuente del haz de luz y alejado a una distancia de varios kilómetros un telescopio (configuración biestática). En esta configuración el campo de visión del telescopio se barría a lo largo del haz transmitido a la atmósfera con el fin de obtener un perfil en altitud de la luz esparcida grabándola en películas fotográficas. En la década de los 50’s refinamientos en la técnica y mejora del instrumental se llevaron a cabo al incluir grabado electrónico de la luz retroesparcida, permitiendo medir perfiles de densidad atmosférica arriba de altitudes de 67 km. Fue en esta década también, en 1953 para ser exactos, cuando Middleton y Spilhaus introdujeron por primera vez el acrónimo Lidar [3].

No fue hasta la invención del Láser en 1960 y del láser pulsado en el año de 1962 que se dio una nueva fuente de luz potente para sistemas Lidar, desde entonces el éxito en el desarrollo de la técnica Lidar ha estado fuertemente relacionado con el progreso del láser; además de los láseres, para los sistemas Lidar avanzados son necesarios dispositivos como: filtros ópticos con una alta transmisividad y con un ancho de banda angosto y de alta supresión fuera de banda, detectores eficientes para amplias regiones de longitudes de onda y sistemas de adquisición de datos con rangos dinámicos de varios órdenes de magnitud.
La historia de la técnica Lidar en México aparece por primera vez en 1986 con la colaboración de los países de México e Italia en un proyecto científico, cuyo objetivo principal fue la transferencia de tecnología Lidar a México, la colaboración fue entre investigadores del Centro de Informazione Studi Esperienze (CISE) en Italia e investigadores del Instituto de Investigaciones Eléctricas (IIE) en México. Recientemente R. Castrejón-García et. al [4] del Instituto Nacional de Astrofísica, Óptica y Electrónica (INAOE) han diseñado y desarrollado un Lidar de esparcimiento elástico para el estudio de la estructura de la atmósfera.
En el área de optoelectrónica de la Facultad de Ciencias de la Electrónica se investiga el tema de esparcimiento de luz láser en diferentes medios turbios. A nivel de laboratorio en una cámara de esparcimiento se están caracterizando a través de un Lidar, comercial de corto alcance, nubes de vapor de agua (ver figura 1).
De igual manera se está desarrollando un sistema Lidar portable monoestático coaxial de retroesparcimiento elástico, para el monitoreo ambiental de la ciudad de Puebla; este sistema emite en las líneas láser de 1064 y 532 nm (ver figura 2), y en una segunda etapa se pretende implementar un Lidar que mida la polarización de la luz retroesparcida para deducir el tamaño del dispersor.
Referencias
[1] C. Weitkamp. (2005). “Lidar: Range-Resolved Optical Remote Sensing of the Atmosphere” Chap. 1. Ed. Springer Series in Optical Sciences .
[2] Th.G. Brown, K. Creath, H. Kogelnik,M.A. Kriss, J.Schmit, M.J. Weber. (s/d). “The Optics Encyclopedia”, Basic. Foundations and Practical Applications, Volume 2 G-L, Lidar (Láser Radar); Ed. Wiley-VCH.
[3] W.E.K. Middleton, A.F. Spilhaus. (1953). Meteorological Instruments. Toronto: University of Toronto Press,
[4] R. Castrejón-García, J.R. Varela, O. Hernández Utrera, L. Altamirano-Robles. (2017). Design and development of an elastic-scattering lidar for the study of the atmospheric structure. México: Revista Mexicana de Física. No.63, pp 49-54.