 Los drones son aeronaves autónomas no tripuladas y presentan un gran desarrollo en los últimos años, debido a que se pueden usar en muchas aplicaciones en la vida diaria de la sociedad moderna que abarca desde transporte de personas, mercancía, tareas de vigilancia, misiones militares hasta asistencia médica urgente en situaciones de vida o muerte. Su construcción conlleva un proceso de investigación científica ya que existen varios elementos que no han sido resueltos completamente hasta el día de hoy como la ubicación en el espacio tridimensional en forma autónoma, por lo que drones que operan a grandes distancias utilizan el GPS para conocer ubicación.
Los drones son aeronaves autónomas no tripuladas y presentan un gran desarrollo en los últimos años, debido a que se pueden usar en muchas aplicaciones en la vida diaria de la sociedad moderna que abarca desde transporte de personas, mercancía, tareas de vigilancia, misiones militares hasta asistencia médica urgente en situaciones de vida o muerte. Su construcción conlleva un proceso de investigación científica ya que existen varios elementos que no han sido resueltos completamente hasta el día de hoy como la ubicación en el espacio tridimensional en forma autónoma, por lo que drones que operan a grandes distancias utilizan el GPS para conocer ubicación.
El procesamiento necesario para controlar un dron requiere de un gran número de operaciones matemáticas y este por lo general se realiza por medio de una computadora personal, aunque actualmente hay tarjetas con FPGAs que permiten al diseñador integrar una computadora dentro de un circuito integrado. Un FPGA es un integrado que contiene miles y hasta millones de compuertas lógicas con las que se pueden construir dispositivos digitales reconfigurables. Esto último permite reducir el consumo de energía lo que produce un aumento en el tiempo de operación del dron cuando su fuente de energía es una batería.
Uno de los temas más interesantes de los drones es la utilización de diversas técnicas para aproximar la posición en el espacio ya que muchas de ellas permiten realizar trayectorias complejas mediante la utilización de GPS y sistemas de medición inercial. La utilización de cámaras para el vuelo autónomo es uno de los avances más recientes de los drones debido a que con se permite el seguimiento de tuberías de gasolina o petróleo o inclusive seguir a multitudes en algún evento.
El desarrollo de un dron comienza con la descripción del movimiento mediante un conjunto de ecuaciones dependiente la energía proporcionada por motores que facilitan la comprensión del dispositivo, a estas ecuaciones se le llama modelo dinámico. Su análisis conlleva a determinar el sistema de control a utilizar y facilita la determinación de la forma, tamaño, peso y distribución de las piezas mecánicas.
Un sistema de control son varios algoritmos que permiten manipular la ubicación del dron en función del punto deseado. Utilizando el modelo dinámico en conjunto con el sistema de control se utilizan simulaciones del dron que ayudan a verificar si el movimiento de la aeronave es lo planeado. En esta parte se diseña que tan rápido se va a mover el dron y con base en ello se seleccionan los motores, las hélices y la batería.
Los transductores son dispositivos que miden el valor de una variable física como la distancia, la inclinación o la velocidad y son seleccionados en función de la simulación del dron. La medición de la posición del dron en el espacio y la inclinación angular facilitan la ubicación en el espacio tridimensional en forma autónoma.
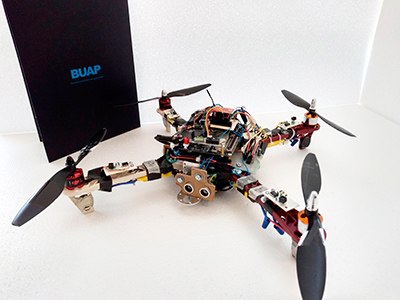
La estructura mecánica está conformada esencialmente por cuatro barras de plástico y sostiene todos los componentes del dron como el sistema digital, la batería, los sensores y la computadora basada en un FPGA. El centro de masa es la ubicación en la estructura del dron donde se considera que está concentrada toda la masa por lo que el proceso de construcción requiere del balanceo de la masa de todos los componentes tal que este centro se ubique en el centro geométrico del dron. La importancia radica en el principio de funcionamiento de las cuatro hélices donde un ligero desbalanceo de la ubicación del centro de masa conlleva un desempeño no deseado.
Las hélices del dron funcionan mediante la fricción con el aire, ya que el perfil aerodinámico genera una fuerza de empuje en función de la velocidad de rotación. El flujo de aire generado pasa a través de la estructura mecánica y permite compensar la gravedad de la tierra para permitir el vuelo del dron. En los diseños más recientes de los drones se observan distintas configuraciones de las hélices ya que cada una facilita alcanzar un objetivo específico como la velocidad de desplazamiento del dron.
Los motores eléctricos utilizados permiten hacer girar las hélices a gran velocidad, transfiriéndole la energía mecánica necesaria para generar una fuerza de empuje determinada. La potencia máxima que desarrollan estos motores alcanza 320 watts a pesar de su pequeño tamaño y bajo peso lo que los hace ideales para su utilización en drones. El control de la energía mecánica de la hélice se realiza mediante circuitos electrónicos pequeños que se denominan servo-amplificadores.
Los transductores del dron son instalados en la estructura mecánica en posiciones determinadas por el modelo dinámico ya que es en ese sitio donde se han creado las ecuaciones que describen en comportamiento del movimiento. La ubicación del dron en forma autónoma es realizada mediante la utilización de la medición de la posición tridimensional y es llevada a cabo mediante diversas técnicas de estimación. Desde GPS, cámaras, sistemas de medición inercial hasta estimadores basados en ecuaciones, la medición de la posición tridimensional es un área grande de investigación científica de los drones ya que cada solución propuesta cumple un objetivo particular.
El sistema digital donde se encuentra el sistema de control utiliza bloques programados dentro del FPGA capaces de realizar operaciones matemáticas complejas necesarias para el vuelo autónomo del dron. Una gran ventaja de utilizar un FPGA es la posibilidad de diseñar procesos que funcionen en forma paralela tal como lo hacen las computadoras más potentes y que permiten hacer más operaciones matemáticas en menos tiempo. En comparación con una tarjeta madre de una computadora donde se ubican diversos sistemas digitales externos como periféricos para manipular la memoria RAM, el disco duro, la pantalla entro otros, un FPGA puede contener todos esos sistemas digitales en un solo chip sin necesidad de utilizar varios circuitos adicionales. El algoritmo de control es programado en el sistema digital y finalmente se realiza el ajuste de cada parámetro numérico del algoritmo considerando el comportamiento del movimiento del dron. Este proceso es denominado sintonización de ganancias del sistema de control y es una labor muy compleja que requiere de tiempo sobre todo de experiencia el diseñador.
Los drones son aeronaves que han permitido la implementación de tareas que hace años no parecían posibles. Su desarrollo conlleva un proceso de investigación científica que permita diseñarlos para cumplir con objetivos específicos y que sean seguros de manipular por los usuarios. El desarrollo de nuevas tecnologías ha permitido la miniaturización de los drones y ha facilitado su construcción, además, permite la elaboración de algoritmos de control más efectivos para la fabricación de aeronaves autónomas muy seguras y eficientes.
Referencias
Castillo Pedro & Lozano Rogelio & E. Dzul Alejandro. (2005). Modelling and Control of Mini-Flying Machines. USA: Springer.
Anders S. Kristensen & Dewan Ahsan & Saqib Mehmood & Shakeel Ahmed. (2017). Rescue Emergency Drone for Fast Response to Medical Emergencies Due to Traffic Accidents. International Journal of Health and Medical Engineering Vol. 11, No:11, 2017.
Heba talla Mohamed Nabil ElKholy. (verano 2014). Dynamic Modeling and Control of a Quadrotor Using Linear and Nonlinear Approaches, The American University in Cairo, pag(39-40).
Yunus A. Cengel & Jonh M. Cimbala. (2010). Mecánica de fluidos, fundamentos y aplicaciones.
https://www.boschsensortec.com/bst/products/all_products/bno55
Twittear