
{kind=link}
En general la apariencia de las máquinas no es tan relevante; lo que más nos importa es que realicen bien su función. Por ejemplo, si pensamos en un robot industrial en una planta de manufactura de automóviles, lo importante es que el robot realice su tarea, como soldar o pintar un carro, de la mejor manera y en forma eficiente. Pero hay otra clase de robots, conocidos como robots de servicio, donde la apariencia sí es importante, en particular para aquellos que interactúan con las personas.
Los robots de servicio son aquellos diseñados para ayudar a las personas en diversas actividades. Algunos robots de servicio que realizan actividades sencillas, como aspirar la casa o cortar el césped, ya son productos comerciales en la actualidad. Hay algunos más sofisticados que empiezan a aparecer en el mercado, como robots recepcionistas o robots guía en exhibiciones. Otros están aún en los laboratorios de diversas universidades y centros de investigación en el mundo, como robots que auxilien a personas discapacitadas o de la tercera edad, robots que ayuden en situaciones de desastre o robots ayudantes en hospitales. Algo que tienen en común muchos de los robots de servicio es que deben interactuar con las personas a las que apoyan.
Si un robot va a interactuar con una persona, su apariencia física empieza a ser relevante; por ejemplo, un brazo robótico industrial de gran tamaño puede ser intimidante para el usuario no experto. Al iniciarse el desarrollo de los robots de servicio se pensó que si su apariencia era parecida a la de una persona sería más atractivo y fácil para interactuar para la mayoría de la gente, en especial para personas no expertas en robótica. Sin embargo, una muy interesante investigación de un profesor japonés demostró que no necesariamente mayor parecido a una persona es mejor.
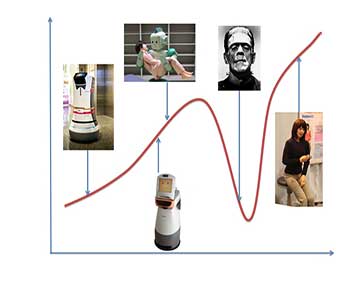
Masahiro Mori analizó qué tan atractivo es un robot a las personas mientras más se va pareciendo a un humano. A partir de sus estudios, obtuvo una relación entre el “parecido a una persona” de un robot, y su “atractivo” o respuesta emocional de las personas. Esta relación la podemos representar con una gráfica donde el eje horizontal representa qué tan parecido es el robot a una persona, y el eje vertical qué tan atractivo es (ver figura). Lo que observamos es que al principio mientras más se va apareciendo el robot a una persona, va aumentando su “atracción”, pero llega un momento en que de repente cae fuertemente la percepción de atractivo, para finalmente volver a subir al final. A este fenómeno se le conoce en inglés como el “uncanny valley”; ¡que es una especie de valle de la muerte!
¿A qué se debe este fenómeno? Podemos imaginarnos que al inicio de la gráfica (del lado izquierdo) el robot tiene cierta forma humanoide, pero no tiene una cara como una persona; este tipo de robots no son muy atractivos pero tampoco nos disgustan. Mientras vamos avanzando en la gráfica hacia la derecha, podemos pensar en un robot con una cara en forma muy sencilla, como la de los personajes de caricatura y una “carita feliz”. Estos robots empiezan a ser más atractivos, en forma análoga a como los personajes de caricatura son en general atractivos para todos, en particular a los niños. Si continuamos haciendo el robot más parecido a una persona, pero todavía no es exactamente igual, entonces caemos en el “valle misterioso”. Lo que pasa en este caso es que el robot puede tener una apariencia parecida a un monstruo, a un ente deforme como Frankestein, y es por ello que causa repulsión.
Existen varias hipótesis científicas que tratan de explicar este fenómeno. Se piensa que en parte puede deberse a que este tipo de apariencias evocan a la muerte o situaciones de guerra, con personas heridas o desfiguradas. Otra explicación es que esto se deba a un proceso evolutivo que evita apariencias que indiquen fuentes de patógenos, generando este fenómeno de repulsión. El efecto se presenta tanto al ver al robot estático, como en una foto, o al robot en movimiento.
Una vez que el robot se parece suficientemente a una persona, se supera el valle misterioso y su apariencia deja de ser repulsiva, incluso con una mayor atracción que los robots no tan parecidos a un humano que están antes del valle.
Este estudio nos deja un mensaje importante a los diseñadores de robots de servicio. A menos de que logremos que el robot tenga una apariencia muy cercana a la de una persona, es mejor un diseño caricaturesco, con ciertas características humanoides, pero sin parecerse mucho a una persona. En general la mayoría de los robots de servicio actuales siguen este principio, teniendo una apariencia más “robótica” que humana. Hay algunas contadas excepciones, como la de un robot japonés muy parecido a su diseñador.
La apariencia física es uno de los factores relevantes para la interacción humano-robot, pero no es el único. Otro aspecto de interés es que el robot logre comunicarse con las personas en forma natural, tanto para recibir comandos como para dar información. Esto implica utilizar las formas de comunicación más comunes entre nosotros, como son la voz y los ademanes. Actualmente muchos de los robots de servicio en desarrollo integran capacidades de entender comandos por voz en “lenguaje natural” (español, inglés, etcétera) y también de responder en forma similar utilizando lo que se conoce como síntesis de voz.
La comunicación mediante ademanes también es relevante para la interacción con robots de servicio. Los ademanes sirven como un complemento a la voz, en particular para ambientes ruidosos donde puede ser difícil entender lo que dice la persona para el robot. También son útiles para comunicar cierta información, como por ejemplo apuntando con la mano: “ve para allá”, “tráeme ese objeto”.
Finalmente, se ha visto que considerar ciertos aspectos emotivos o afectivos es también importante para una mejor comunicación humano-robot. Por ejemplo, el robot puede tratar de reconocer el estado afectivo de la persona con que interactúa y modular su respuesta de acuerdo a dicho estado. También se puede hacer en sentido inverso, que el robot simule ciertas emociones para hacer más efectiva la comunicación. Por ejemplo, un robot que sirva de guía en un museo y detecta que está rodeado por personas y no puede moverse para seguir el recorrido podría simular una cara de tristeza, dando el mensaje a las personas de alejarse para que pueda continuar su tarea.
En el futuro los robots de servicio van a ser tan comunes como las computadoras actualmente; seguramente tendremos varios robots en la casa, ayudándonos en diversas tareas. Así que cuando te encuentres con un robot en tu camino, obsérvalo con cuidado para ver si no ha caído en el valle misterioso!
Bibliografía
Mori, M. 1970/2012. The uncanny valley (K. F. MacDorman & N. Kageki, Trans.). IEEE Robotics & Automation Magazine, 19(2), 98–100. Ver también: http://spectrum.ieee.org/automaton/robotics/humanoids/an-uncanny-mind-masahiro-mori-on-the-uncanny-valley