
{kind=link}
La mano humana es la interfase del hombre, transformadora de su hábitat, cuya propiedad de manipulación autónoma no ha sido alcanzada aún por la mano robótica humanoide. De entre todas las criaturas que habitan nuestro planeta, el ser humano es el que ha sido dotado de manos con habilidad motriz para materializar sus deseos. Su inteligencia se manifiesta por el uso de sus manos. Por medio de las manos se han construido naves espaciales, vehículos terrestres y marinos, edificaciones para una amplia gama de actividades humanas, entre otras obras. Con la mano se estrechan otras para mostrar afecto, respeto o admiración. Con las manos se ofrecen caricias y se manifiesta amor. Con la mano es posible restaurar nuestro hábitat natural que en otro tiempo ella misma depredó.
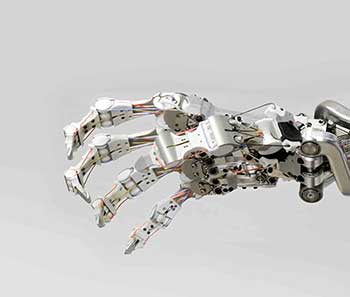
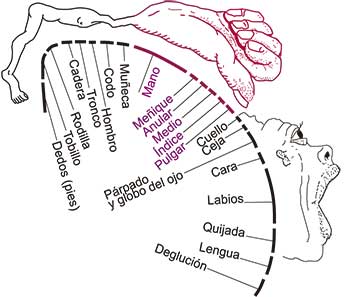
Con el fin de interactuar con el ambiente natural, la naturaleza ha dotado al ser humano con programas computacionales biológicos localizados en lo que se conoce como la corteza cerebral motriz. Estas capacidades están asignadas a las diferentes partes del cuerpo de acuerdo con la distribución mostrada en el homúnculo de la figura, la cual muestra también una mano robótica antropomórfica del Centro Aeroespacial de Alemania. El término homúnculo se usa comúnmente para describir una figura humana distorsionada, dibujada para reflejar la proporción de la corteza cerebral asignada a nuestras partes corporales. Las manos y labios son considerablemente más hábiles y sensibles que otras partes del cuerpo, por lo que en la figura se muestran extremadamente grandes.
Se ha reportado en la literatura de manos robóticas que a la mano humana se le dedica entre 30 y 40 por ciento de corteza cerebral motriz, como se ilustra en la figura, mientras que en el mono se dedica entre 20 y 30 por ciento. El relativo alto porcentaje de corteza asignado a la mano natural puede servir de inspiración al diseñador de software para fijar metas de desempeño de la mano artificial.
La figura sugiere que la distribución de recursos que existe de la corteza cerebral hacia la mano humana también deberá existir entre un software de computadora y la mano artificial. La mano robótica antropomórfica DLR de la figura tiene el tamaño de la mano humana, con cinco dedos articulados movidos por 38 tendones de cuerdas, cada uno conectado a un motor individual alojado en el antebrazo. La principal capacidad que hace a la mano DLR diferente de otras manos robóticas es que puede controlar su rigidez. Los motores pueden tensar los tendones, permitiendo a la mano absorber choques violentos. La mano tiene un total de 19 grados de libertad, un grado menos que la mano natural, y puede mover los dedos independientemente para sujetar objetos variados. Los dedos pueden ejercer una fuerza de hasta 5 Newtons, lo que también hace a esta mano una de las más fuertes entre las construidas hasta hoy. En resumen, la cualidad sobresaliente de esta mano es su robustez. Los diseñadores aseguran que en términos de capacidades de sujeción y destreza, la mano DLR está cerca de la mano humana. Sin embargo, la manipulación autónoma aún es una meta pendiente en esta mano y en todas las manos robóticas construidas en los diferentes laboratorios del mundo. Es decir, se requiere incrementar la calidad del software dedicado a las manos artificiales.
Un desafío científico y tecnológico de nuestro tiempo es dotar al robot de manos robóticas humanoides con habilidades motrices y sensoriales equivalentes a la humana. La mano humana manipula una amplia forma de objetos en forma autónoma apoyándose en recursos como los sentidos, la memoria, la inteligencia y la conciencia, entre otros. Por su parte, la mano robótica dispone actualmente de una combinación de métodos y tecnologías como las siguientes: visión robusta, retroalimentación táctil, estabilidad de la sujeción, modelado bajo incertidumbre, aprendizaje y planeación del movimiento. El área de aplicación de las manos robóticas más desarrollada actualmente es la manipulación teleoperada de objetos regulares. Es decir, el robot con manos robóticas es todavía un asistente del ser humano. Se prevé que será de utilidad en aplicaciones importantes como tele-cirugía y operaciones de mantenimiento en plataformas espaciales.
La manipulación autónoma de objetos irregulares por medio de manos robóticas antropomórficas es actualmente una meta pendiente de realizar. Se tiene la esperanza de que esta clase de manipulación se alcance cuando se desarrolle la conciencia artificial. Ray Kurzweil, en The Age of Spiritual Machines: When Computers Exceed Human Intelligence (New York: Viking, 1999), defiende la teoría de la convergencia máquina-hombre, la cual argumenta que cualquier proceso computacional suficientemente capaz de alterarse a sí mismo y de auto organizarse puede producir conciencia. Con base en esta teoría, Kurzweil predice que es cuestión de décadas para dotar al robot de conciencia y por tanto de inteligencia similar o superior a la humana. Kurzweil tiene cierto grado de credibilidad porque predijo correctamente el año en que una computadora derrotaría a un maestro ajedrecista. Como se sabe, la computadora Deep Blue de la IBM abatió a Gary Kasparov justo siete años antes de haber negado que tal habilidad era posible.
El ser humano pretende ser un Dios cuando sueña con crear un ser artificial que funcione como su siervo, aunque si se le dota de conciencia, puede suceder que los papeles se inviertan. La mano robótica es una parte clave que permite actualmente al robot humanoide interactuar son su ambiente, como sucede, en forma incipiente, en el ASIMO de la compañía Honda y en el Robonaut de la NASA (National Aeronautic and Space Administration). Se espera que con la mano robótica el robot humanoide podrá, igual que su compañero el humano, construir naves espaciales, vehículos terrestres y marinos, entre otras cosas. Podrá estrechar otras manos para mostrar afecto, respeto, o admiración. Y posiblemente, podrá restaurar nuestro hábitat natural. Si Kurzweil tiene razón, solo tenemos que sobrevivir unas cuantas décadas más para ser testigos de la mano robótica, tan compleja y delicada como la humana.