 La mecatrónica tiene como antecedentes inmediatos a la investigación en el área de cibernética realizada en 1936 por Alan Turing; en 1948 por Wiener y Morthy; las máquinas de control numérico, desarrolladas inicialmente en 1946 por Devol; los manipuladores, ya sean teleoperados, en 1951 por Goertz, o robotizados, en 1954 por Devol, y los autómatas programables, desarrollados por Bedford Associates en 1968.
La mecatrónica tiene como antecedentes inmediatos a la investigación en el área de cibernética realizada en 1936 por Alan Turing; en 1948 por Wiener y Morthy; las máquinas de control numérico, desarrolladas inicialmente en 1946 por Devol; los manipuladores, ya sean teleoperados, en 1951 por Goertz, o robotizados, en 1954 por Devol, y los autómatas programables, desarrollados por Bedford Associates en 1968.
El término mecatrónica empezó a surgir desde los años 60 como concepto de automatización de la industria japonesa; fue introducido por primera vez en 1969 por el ingeniero Tetsuro Mori, trabajador de la Compañía Eléctrica Japonesa Yaskawa en un memorandum (Mori, T., “Mechatronics”, Yaskawa Internal Trademark Application Memo 21.131.01, July 12, 1969), quien junto con Ko Kikuchi aplicó la técnica Kaizen (término japonés que significa mejora continua) para resolver un problema de funcionamiento de uno de los productos que fabricaban en la empresa donde trabajaban, recibiendo en 1972 el derecho de marca (Japan Trademark Registration, no. 946594, Jan. 1972). La filosofía de la empresa Yaskawa, basada en el desarrollo del conocimiento y la búsqueda de la calidad de vida de una sociedad, permitió en 1982 el libre uso del término.
La definición de mecatrónica ha evolucionado desde la original en documentos de aplicación de marca registrada. Yaskawa definió la mecatrónica de la siguiente manera:
La palabra mecatrónica está compuesta por “meca”, de mecanismo, y “trónica”, de electrónica. En otras palabras, tecnologías y productos desarrollados estarán incorporando la electrónica y más a mecanismos, íntimamente, orgánicamente y haciendo imposible decir dónde uno acaba y el otro empieza.
El concepto pasó inadvertido por más de una década, y fue retomado por escuelas europeas, principalmente por The Danish Mechatronics Association, The Mechatronics Group of Finland, The Hungarian Mechatronics Association y diversos Centros de Diseño en Italia, Inglaterra, Alemania y Suecia, principalmente. La evolución del concepto original de mecatrónica desarrollado en Yaskawa, bajo la perspectiva europea, dio como resultado la inclusión de la ingeniería informática en dicho concepto, a fin de no sólo incorporar elementos mecánicos controlados por una electrónica, sino también considerar el desarrollo de cierta inteligencia artificial en las máquinas.
La definición de mecatrónica continuó evolucionando después de que la empresa Yaskawa sugirió el concepto original. Una definición citada frecuentemente fue presentada por Harashima, Tomizuka y Fukada en 1996, y retomada por la Unesco. En sus palabras, la mecatrónica es definida como:
“La integración sinérgica de ingeniería mecánica con la electrónica y el control inteligente por computadora en el diseño y manufactura de productos y procesos industriales”.
Ese mismo año, otra definición fue sugerida por Auslander y Kempf:
“La mecatrónica es una metodología usada para el diseño óptimo de productos electromecánicos”.
En la publicación de la primera revista arbitrada: IEEE/ASME Transactions on Mechatronics, en el año 1996, uno de los autores la definió como: “La combinación sinérgica de la ingeniería mecánica de precisión, control electrónico y los sistemas inteligentes en el diseño de productos y procesos de manufactura.
En 1999, encontramos una recomendación por Willian Bolton:
Un sistema mecatrónico no es sólo la unión de sistemas electrónico y mecánico, y es más que sólo un sistema de control; es una integración completa de todos ellos en la cual existe un enfoque concurrente al diseño.
Una definición más amplia del área de ingeniería mecatrónica:
Mecatrónica es una ingeniería multidisciplinaria de carácter científico y tecnológico que integra las áreas de mecánica, electrónica, informática, control automático y administración de proyectos, con el auxilio de otras áreas del conocimiento para analizar, desarrollar y diseñar sistemas con la finalidad de mejorar la calidad, flexibilidad, bajos costos y productividad de procesos y productos dentro de una amplia gama de aplicaciones científicas, industriales, servicios comerciales, medicina y para beneficiar e impactar a todos los sectores de la sociedad.
Todas estas definiciones y afirmaciones acerca de la mecatrónica son informativas y certeras; sin embargo, cada una falla en capturar la totalidad de la mecatrónica. A pesar de esfuerzos continuos para definir la mecatrónica, clasificar productos mecatrónicos y desarrollar un currículum estándar de mecatrónica, una opinión consciente en una descripción completa de lo que es la mecatrónica nos elude. Esta falta de consenso es una señal saludable. Nos dice que el campo está vivo, que es una materia joven. Incluso sin una descripción definitiva de la mecatrónica, por medio de las definiciones dadas anteriormente y su experiencia los ingenieros entienden la esencia de la filosofía de la mecatrónica.
 |
|
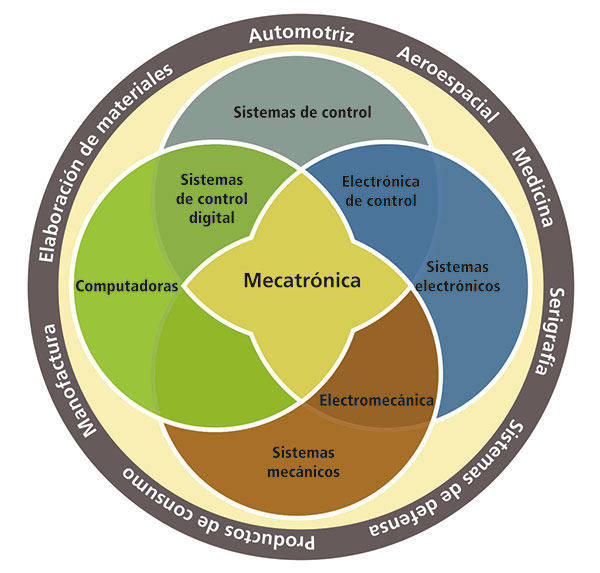
Figura mecatrónica área multidisciplinaria |
La mecatrónica, por su campo de aplicación, está relacionada con un conjunto bastante amplio de disciplinas, tales como la mecánica, cinemática, dinámica, ciencias computacionales, identificación de sistemas, matemáticas, ingeniería de control automático, ingeniería electrónica, cibernética, bioingeniería y visión artificial. En la actualidad la mecatrónica está fuertemente ligada a la automatización, la cual denota una tecnología dirigida a suplir a los seres humanos por máquinas en un proceso de fabricación rutinario o de alto riesgo, considerando no sólo la ejecución de operaciones físicas, sino también el procesamiento adecuado de información sobre el estado del proceso. Un subconjunto de la mecatrónica es la robótica, que es un área multidisciplinaria que aborda la investigación, análisis y diseño de una clase particular de sistemas mecánicos denominados robots manipuladores, los cuales representan retos teóricos debido a su naturaleza multivarible, dinámica no lineal y acoplada.
Durante la década de ochenta el uso de computadoras digitales como componentes de sistemas de control integrales se volvió rutina. Hay literalmente cientos de miles de computadoras en el control de procesos instaladas en todo el mundo. Cualquiera que sea la definición de mecatrónica que uno elija, es evidente que la mecatrónica moderna implica el cálculo como elemento central. De hecho, la incorporación de los microprocesadores para modelar con precisión el sistema mecánico y adaptarse a los cambios en el entorno son la esencia de la mecatrónica moderna y los productos inteligentes.
El estudio de sistemas mecatrónicos puede ser dividido en las siguientes áreas:
1. Modelo físico de sistemas.
2. Sensores y actuadores.
3. Señales y sistemas.
4. Computadoras y sistemas electrónicos.
5. Programación y adquisición de datos.
Los elementos clave de la mecatrónica están ilustrados en la figura. Al seguir madurando el campo de la mecatrónica, la lista de temas relevantes asociados con el área seguramente se expandirá y evolucionará.
Un sistema mecatrónico típico consiste en una estructura mecánica, actuadores, sensores, controladores, dispositivos de acondicionamiento y modificación de señal, dispositivos de interfaz, fuentes de energía, equipo digital de hardware y software.
Para la tarea de diseño e implementación de un sistema mecatrónico es importante tener una nueva visión de los procesos, del diseño integrado propio, una consideración formal de la información y la transferencia de energía entre los componentes del sistema. De esta forma, dicho enfoque integral de la mecatrónica se traducirá en mejores productos, servicios, un mejor desempeño y una mayor fiabilidad, acercándose de alguna manera a la optimización. Esto permitirá el desarrollo y producción de sistemas electromecánicos de manera eficiente, rápida y económicamente.
Más información
Mori, T.,1969, “Mechatronics”, Yaskawa Internal Trademark Application Memo 21.131.01, July 12.
Comerford R.,1994, “Mecha…What?”, IEEE Spectrum, Tutorial/Design, August.
Dorf, R. C. and Kusiak, 1994, A., Handbook of Automation and Manufacturing, John Wiley & Sons, New York.
Kyura, N. and Oho, H., 1996, “Mechatronics an industrial perspective”, IEEE/ASME Transactions on Mechatronics, Vol. 1, No. 1, pp. 10-15.
Harshama, F., Tomizuka, M., and Fukuda, T., “Mechatronics What is it, why, and how? an editorial”, IEEE/ASME Transactions on Mechatronics, Vol. 1, No. 1, 1996, pp. 1-4.
Auslander, D. M. and Kempf, C. J., 1996, Mechatronics: Mechanical System Interfacing, Prentice-Hall, UpperSaddle River, NJ.
Shetty, D. and Kolk, R. A., 1997, Mechatronic System Design, PWS Publishing Company, Boston, MA,,
Bolton, W., 1999, Mechatronics: Electrical Control Systems in Mechanical and Electrical Engineering, 2nd Ed. Addison-Wesley Longman, Harlow, England.
Robert H. Bishop, 2002, The Mechatronics Handbook, CRC Press, ISA-The Instrumentation, Systems, and Automation Society. .
Clarence W. de Silva, 2005, Mechatronics An Integrated Approach, CRC Press.
Sabri Cetinkunt, 2007, Mechatronics, Ed. John Wiley & Sons, Inc.
Reyes Cortés, Fernando, Jaime Cid Monjaraz y Emilio Vargas Soto, 2013, Mecatrónica Control y Automatización, Editorial Alfaomega.
*[email protected] · [email protected]